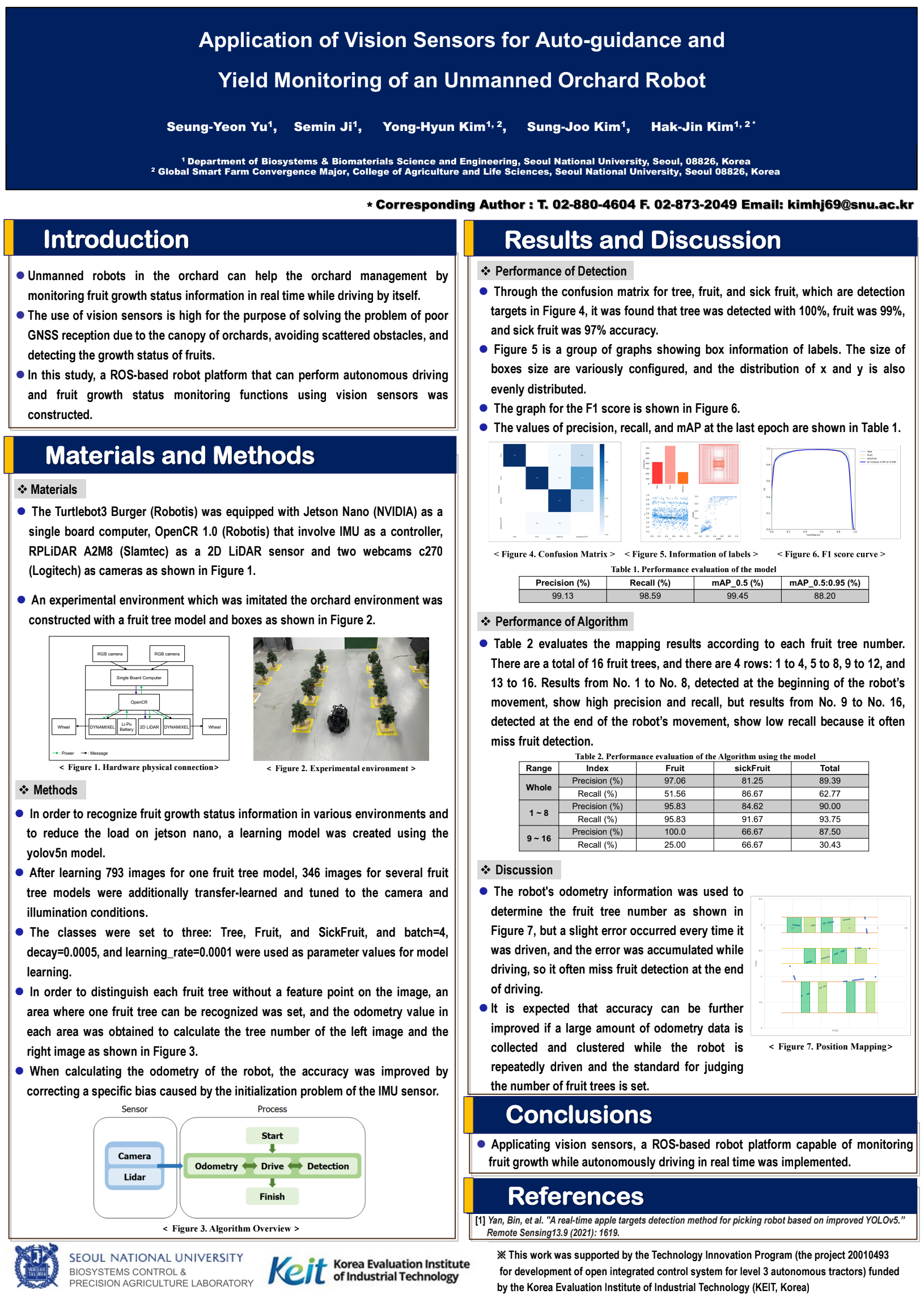
Application of Vision Sensors for Auto-guidance and Yield Monitoring of an Unmanned Orchard Robot
Seungyeon Yu, Semin Ji, Yonghyun Kim, Sungjoo Kim, and Hakjin Kim
In 2022 KSAM & KSBEC Spring Conference, 2022
Poster Presentation
Unmanned robots in the orchard can help the orchard management by monitoring fruit growth status information in real time while driving by itself. The use of vision sensors is high for the purpose of solving the problem of poor GNSS reception due to the canopy of orchards, avoiding scattered obstacles, and detecting the growth status of fruits. In this study, a ROS-based robot platform that can perform autonomous driving and fruit growth status monitoring functions using vision sensors was constructed.